

DYNAMICAL SYSTEMS Tutorial 11
![]() Functions and Variables Used in This Tutorial
Functions and Variables Used in This Tutorial
arrowflag, arrowvec, classify2D, labshift, liaparmval, liaparmvec, liapcontours,
liapsign, liapsignseq, orbdt,
orbdtval, parmval, parmvec, plotreset, plrange, portrait, setparm, setstate,
slopevec, statevec, sysid, and sysname.
![]() Description of
Systems Used in This Tutorial
Description of
Systems Used in This Tutorial
In this tutorial, we use Liapunov functions to look at the stability of some
planar equilibria. The routines
demonstrated here do not help in the selection of a trial form for a Liapunov
function, but they do allow a quick graphical
check on the sign of either the function or its orbital derivative. As examples,
we use two simple nonlinear systems for
which linearization does not yield a definite answer on the stability question.
Both systems are centers in linear theory.
![]() First Example
First Example
We define a simple nonlinear system with one equilibrium, at x = y = 0.
setstate[{x,y}];
setparm[{a}];
slopevec = {-2*y-x^3, a*x - y^3};
parmval = {1};
sysname = "Liap1";
We first try classify2D.
classify2D[{0,0}]
Abbreviations used in classify2D.
L = linear, NL = nonlinear, R2 = repeated root.
Z1 = one zero root, Z2 = two zero roots.
This message printed once.
stable (L), indeterminate (NL) - center
Thus the linearized system is a stable center, so there is
no conclusion about the stability of the nonlinear system. We now
try to find a Liapunov function V. We can establish stability of the equilibrium
if we find a V which (1) is positive definite
in a deleted neighborhood of the origin and which (2) has a negative definite
orbital derivative in a deleted neighborhood of
the origin. Liapunov functions are defined as expressions in the state variables
and any parameters that we wish to include.
We try a simple quadratic function with one parameter.
Vliap = x*x + α*y*y;
This is clearly positive definite for any positive alpha. We next declare the
parameter alpha as a Liapunov parameter, and
set the parameter value to 1.
liaparmvec = {α};
liaparmval = {1};
Now we look at the orbital derivative of this function.
orbdt[Vliap]
2 x (-x3 - 2 y) + 2 y (a x - y3) α
To get the orbital derivative with the current system
parameters substituted, we use orbdtval.
orbdtval[Vliap]
2 x (-x3 - 2 y) + 2 y (x - y3)
We see that a and alpha have been replaced by their present values (1 in both
cases).
To get a quick look at the sign of the orbital derivative, we use the function
liapsign, which will give us a contour
with regions of positive function in white, negative in grey. This routine
automatically substitutes current values of both
system and Liapunov parameters.
plrange = {{-1.5,1.5},{-1.5,1.5}};
liapsign[orbdt[Vliap]]
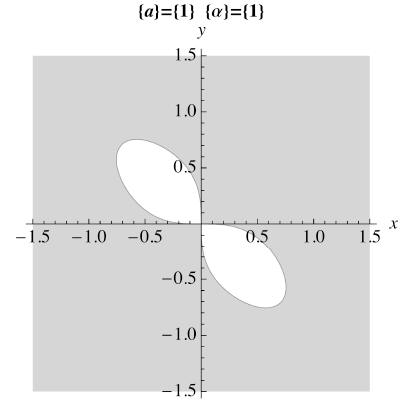
We see that this is not a suitable Liapunov function
because the orbital derivative takes on both signs. We now use
the function liapsignseq to construct a sequence of such graphs, for a sequence
of values of the parameter in the Liapunov
function. We try the values α = 1, 2, and 3.
parmlist = {1,2,3};
liapsignseq[parmlist,orbdt[Vliap]]
Liapunov Sequence for 2 x(-x3 - 2 y) + 2 y (a x - y3) α
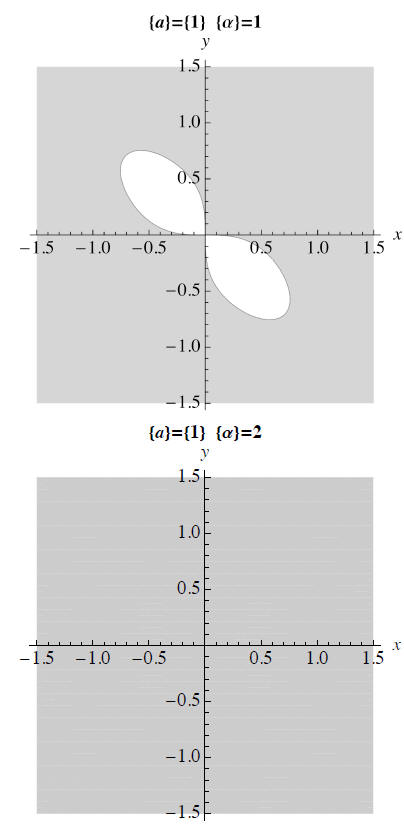
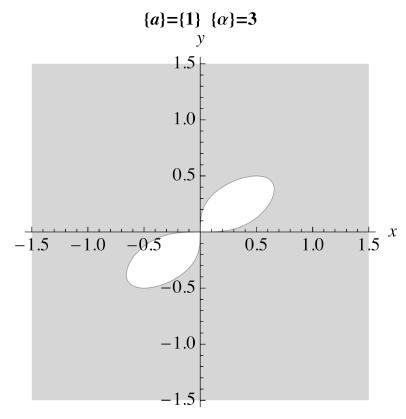
Within the limits of the graphical resolution, it looks like α
= 2 may work. Let's see if we can verify this
analytically.
liaparmval = {2};
orbdtval[Vliap]
2 x (-x3 - 2 y) + 4 y (x - y3)
Simplify[%]
-2 (x4 + 2 y4)
Now we have shown analytically that α = 2 gives us a
valid Liapunov function, and the equilibrium at {0,0} is
therefore strictly stable. In fact the analytical formulas show that the
equilibrium is a global attractor for the system.
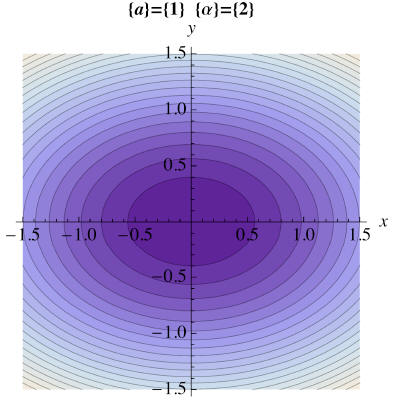
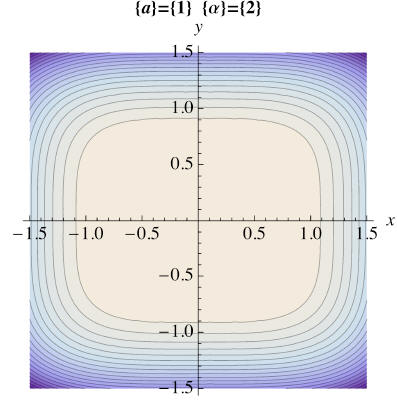
We can look at the contours of both the Liapunov function and its orbital
derivative by using the plotting function
liapcontours.
liapcontours[Vliap]
liapcontours[orbdt[Vliap]]
Before leaving this example, lets see what the solution looks like near the
equilibrium. We look at a phase portrait
with four different initial conditions.
intlist = {{1,1},{-1,1},{-1,-1},{1,-1}};
h = 0.05;
nsteps = 300;
t0 = 0.0;
arrowflag = True;
arrowvec = 
portrait[intlist,t0,h,nsteps,1,2]
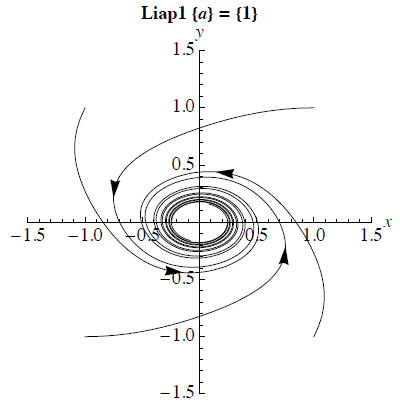
Now we see that the equilibrium is a nonlinear spiral. If we continued the
integration the orbits would eventually
approach the origin, but the process is very slow because the approach is driven
by terms which are cubic in the distance
from the origin.
![]() Second Example
Second Example
In this example, we consider a simple nonlinear system without any parameters.
setstate[{x,y}];
setparm[{}];
parmval = {};
slopevec = {y-x*(x^2+y^2)-5*(x*y)^2,-x-y*(x^2+y^2)};
sysname = "Linear Center";
We start by looking at equilibrium by linearization.
classify2D[{0,0}]
stable (L), indeterminate (NL) - center
As before we get a linear center, which is indeterminate for our nonlinear
system. We try a simple Liapunov function.
Vliap2 = x^2+y^2;
liaparmvec = {};
liaparmval = {};
Now we look at the sign of the orbital derivative.
orbdt[Vliap2]
2 x (y - 5 x2 y2 - x (x2 + y2)) + 2
y (-x - y (x2 + y2))
Simplify[%]
-2 (x4 + 2 x2 y2 + 5 x3 y2
+ y4)
plrange = {{-2,2},{-2,2}};
liapsign[orbdt[Vliap2]]
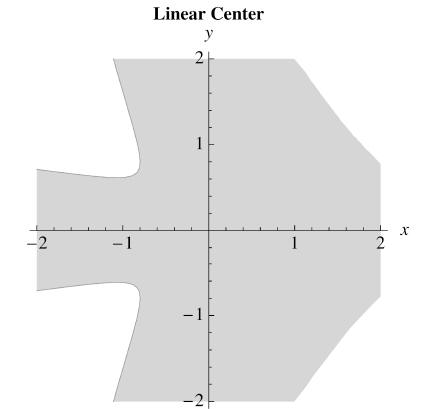
We see that the orbital derivative is not negative everywhere. However, it is
negative definite in a neighborhood of
the origin, so this establishes the local strict stability of the equilibrium
there. This calculation leaves open the question of
whether the origin is a global attractor for the system. Lets look for other
equilibria.
othereq = nfindpolyeq
{{881.08383 - 1.51709 i, -0.298048 - 0.488556i },
{81.08383 + 1.51709 i, -0.298048 + 0.488556 i}, {-1.28523, 0.628076},
{8-0.818705, 0.703033i, 80.0242891 - 0.455594 i}, {-0.747539 + 0.321368 },
{80.0242891 + 0.455594 i, -0.747539 - 0.321368 i},
{80.372109 - 0.207366 i, 0.506403 + 0.654794i },
{80.372109 + 0.207366i, 0.506403 - 0.654794i },
{8-0.428263 + 0.325725 i, -0.12637 + 0.770525i },
{8-0.428263 - 0.325725 i, -0.12637 - 0.770525i }, {0., 0.}
We see that there are two other real equilibrium points. We check their
stability.
classify2D[{-1.28523, 0.628076}]
strictly stable - spiral
classify2D[{-0.818705, 0.703033}]
unstable - saddle
Thus the equilibrium at {-1.28523, 0.628076} is also an attractor.
![]() Exercise
Exercise
This problem is taken from Chapter 10 of Nonlinear Ordinary Differential
Equations, (second edition), D.W.
Jordan and P. Smith, Oxford Press, 1987. Consider the system defined by statevec
= {x,y}, slopevec = {-x3 + y4, -y3 + y4}.
Show that linearization leads to no conclusion for the stability of the origin.
Find a Liapunov function which proves
stability. Use liapsign to check the sign of the orbital derivative.