

Vectors
 |
Vectors |
| Vectors * Scalars | |
| v=Q-P | Vector from P to Q |
Example Vectors
 Geometric Vectors
Geometric Vectors
 Directed Line Segments
Directed Line Segments
Scalar-Vector Multiplication
 Changes Length
Changes Length
Maintains Direction
Vector-Vector Addition
Head-to-Tail Axiom
Euclidean Spaces
Inner (dot) product
u·v=v·u
(au+bv)·w=au·w+bv·w
v·v>0(v!=0)
0·0=0
if u·v=0, then u and v orthogonal
|v|=sqrt(v·v)
Add concepts of affine spaces, such as
points
P-Q is a vector
|P-Q|=sqrt((P-Q)·(P-Q))
Angle between two vectors
u·v=|u||v|cos(theta)
Equation for a circle
|Q-P|=r
sqrt((Q-P)·(Q-P))=r
(Q-P)·(Q-P)=r2
Dot Product
v·w = w·v v·v==0 only when v==0
||v|| = sqrt(v·v) = Distance to v from origin
||v-w|| = Distance from v to w
Projections
![]() Finding the shortest distance between a
Finding the shortest distance between a
point to a line or plane
![]() Start with two vectors
Start with two vectors
![]() Divide one into two parts
Divide one into two parts
![]() One parallel, one orthogonal to the second
One parallel, one orthogonal to the second
original vector
![]() v is first vector, w is second vector
v is first vector, w is second vector
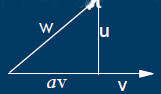
![]() w=av+u
w=av+u
![]() Parallel part, v
Parallel part, v
![]() Orthogonal part, u
Orthogonal part, u
![]() u·v=0
u·v=0
![]() w·v=av·v+u·v=av·v
w·v=av·v+u·v=av·v
![]() a=-(w·v)/(v·v)
a=-(w·v)/(v·v)
![]() av is projection of w onto v
av is projection of w onto v
![]() u=w-[(w·v)/(v·v)]v
u=w-[(w·v)/(v·v)]v
Normalized Vectors
![]() Length of One
Length of One
![]() Unit vector
Unit vector
![]() v'=v/||v||
v'=v/||v||

Angle Between v and w
Calulating the length of a rotated vector. The dot product
of v and w is the length of the projection of w onto v,
provided v is a unit vector
||u|| =||w||cos(theta)
=||w||((v·w)/||v||||w||)
OpenGL and Affine Spaces
![]() Positions always defined relative to the
Positions always defined relative to the
origin of the current coordinate system
![]() Transform the coordinate system to take
Transform the coordinate system to take
positions relative to some other point
![]() Necessary for computing distances, angles,
Necessary for computing distances, angles,
etc.
Matrices
![]() nxm array of scalars
nxm array of scalars
![]() n Rows
n Rows
![]() m Columns
m Columns
![]() If m=n then square matrix
If m=n then square matrix
![]() The elements of a matrix A are {aij}, i=1,...,n,
The elements of a matrix A are {aij}, i=1,...,n,
j=1,...,n
![]() A=[aij]
A=[aij]
![]() Transpose of A of n is mxn matrix with rows
Transpose of A of n is mxn matrix with rows
and columns interchanged
![]() AT=[aji]
AT=[aji]
![]() Single row or single column
Single row or single column
![]() Row Matrix
Row Matrix
![]() Column Matrix
Column Matrix
![]() b=[bi]
b=[bi]
![]() Transpose of a row matrix is a column
Transpose of a row matrix is a column
matrix
![]() Transpose of a column matrix is a row
Transpose of a column matrix is a row
matrix
 |
Identity Matrix MI=M |
Identity Matrix
![]() 1's along diagonal
1's along diagonal
![]() I=[aij] aij={1 if i=j, 0 otherwise
I=[aij] aij={1 if i=j, 0 otherwise
![]() AI=A
AI=A
![]() IB=B
IB=B
Matrix Operations
![]() Scalar-matrix multiplication
Scalar-matrix multiplication
![]() aA=[aaij]
aA=[aaij]
![]() a(bA)=(ab)A
a(bA)=(ab)A
![]() abA=baA
abA=baA
![]() Matrix-matrix addition
Matrix-matrix addition
![]() C=A+B=[aij+bij]
C=A+B=[aij+bij]
![]() Commutative
Commutative
![]() Associative
Associative
![]() Matrix-matrix multiplication
Matrix-matrix multiplication
![]() Product of nxl and lxm is nxm
Product of nxl and lxm is nxm
![]() Middle dimmension MUST match
Middle dimmension MUST match
![]() C=AB=[cij]
C=AB=[cij]
![]() cij=Sum[k=1,l]aikbkj
cij=Sum[k=1,l]aikbkj
![]() Associative
Associative
![]() NOT Commutative
NOT Commutative
![]() AB!=BA
AB!=BA
![]() May in fact not even be defined
May in fact not even be defined
![]() Order matters
Order matters
![]() Application to Transformations
Application to Transformations
Row and Column Matrices
![]() Representation of vectors or points
Representation of vectors or points
![]() p=[x y z]T
p=[x y z]T
![]() pT=[x y z]
pT=[x y z]
![]() Transformation - Square matrix
Transformation - Square matrix
![]() Point - Column matrix of 2, 3, or 4 pts.
Point - Column matrix of 2, 3, or 4 pts.
![]() p'=Ap
p'=Ap
![]() Transforms p by A
Transforms p by A
![]() p'=ABCp
p'=ABCp
![]() Concatenations of transformations
Concatenations of transformations
![]() (AB)T=BTAT
(AB)T=BTAT